Finalmente, el martes pasado adquirimos la fuente switching de 24V y 4.2A, suficientes para alimentar al motor con los 24V nominales especificado en la hoja de datos.
Destacamos nuevamente que las pruebas fueron hechas a lazo abierto, con el único objetivo de contrastar el modelo matemático a los datos arrojados por la planta. Con ésta misma idea, obtuvimos las curvas anteriores (paso 18 y 18 bis) que fueron dispares, especialmente en el primer caso, aunque permitieron exponer algunos defectos mecánicos que se resolvieron a tiempo.
Además, ajustamos las curvas manualmente para determinar qué parámetro tiene mayor efecto sobre el modelo y cómo éste afecta al error entre modelo y planta. De ésta forma, encontramos que la masa inercial del motor-polea es la constante que más influyó para adaptar el modelo teórico al sistema real.
La tabla muestra la variación de Jmp para cada sentido:
retroceso | avance
Prueba 1 = 7.30e-5 | Prueba 2 = 7.50e-5
Prueba 3 = 7.00e-5 | Prueba 4 = 7.50e-5
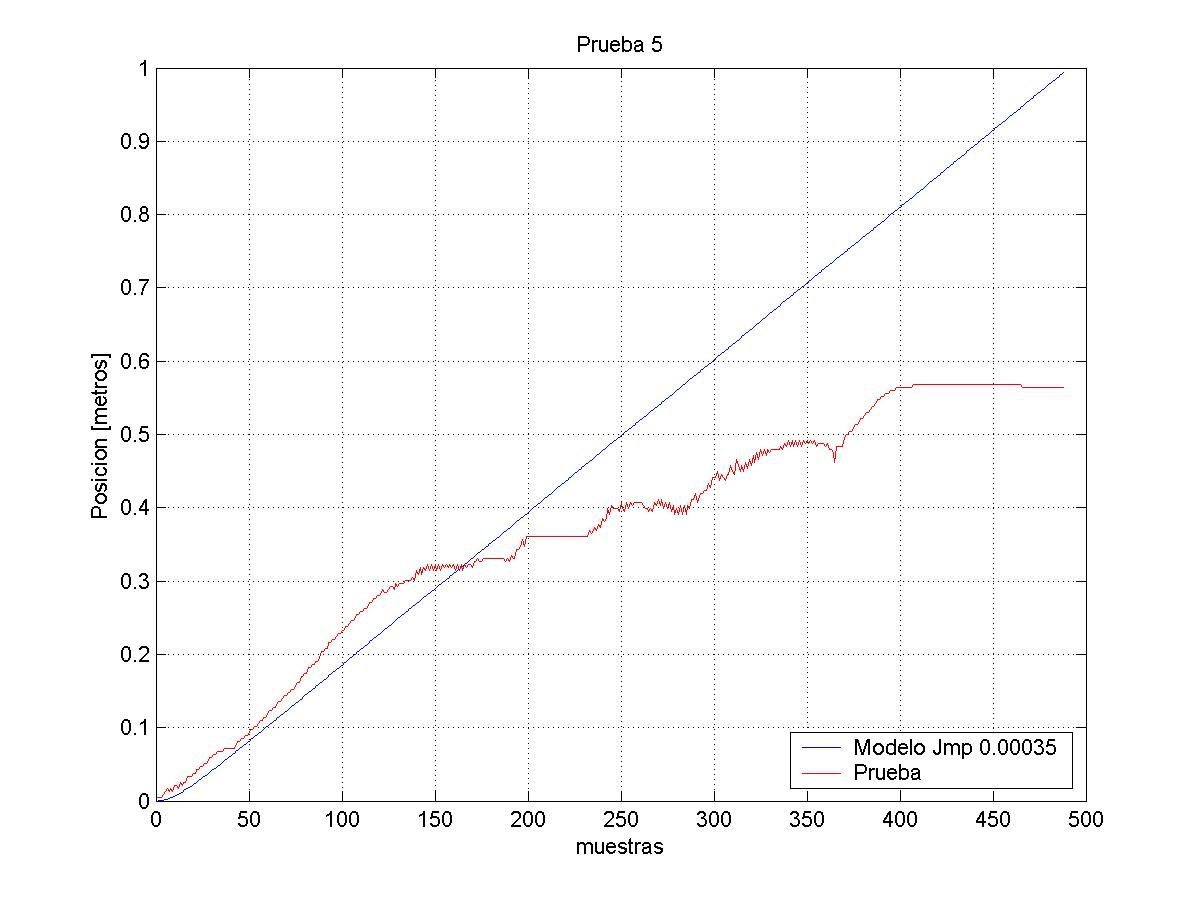
Prueba 5 = 7.37e-5 | Prueba 6 = 7.60e-5
Prueba 7 = 7.37e-5 | Prueba 8 = 7.55e-5
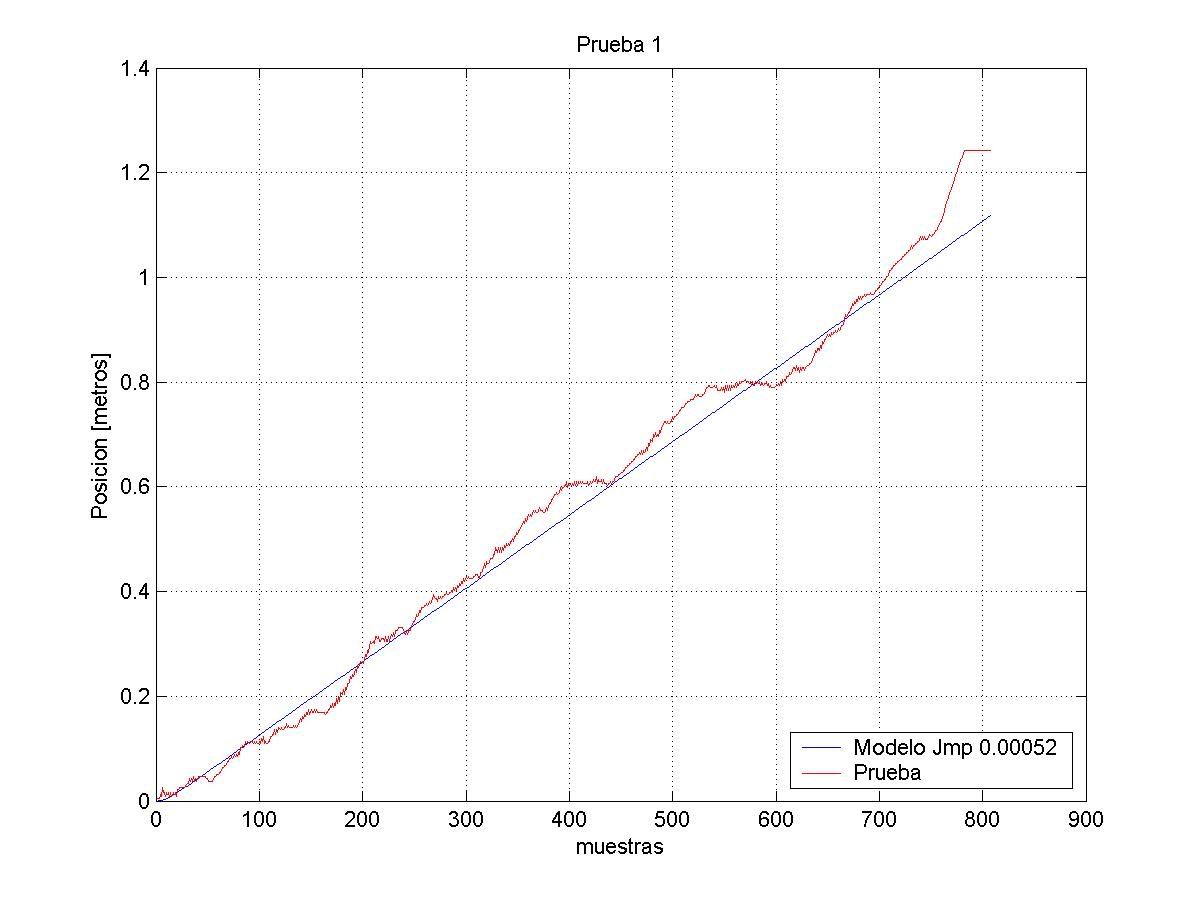
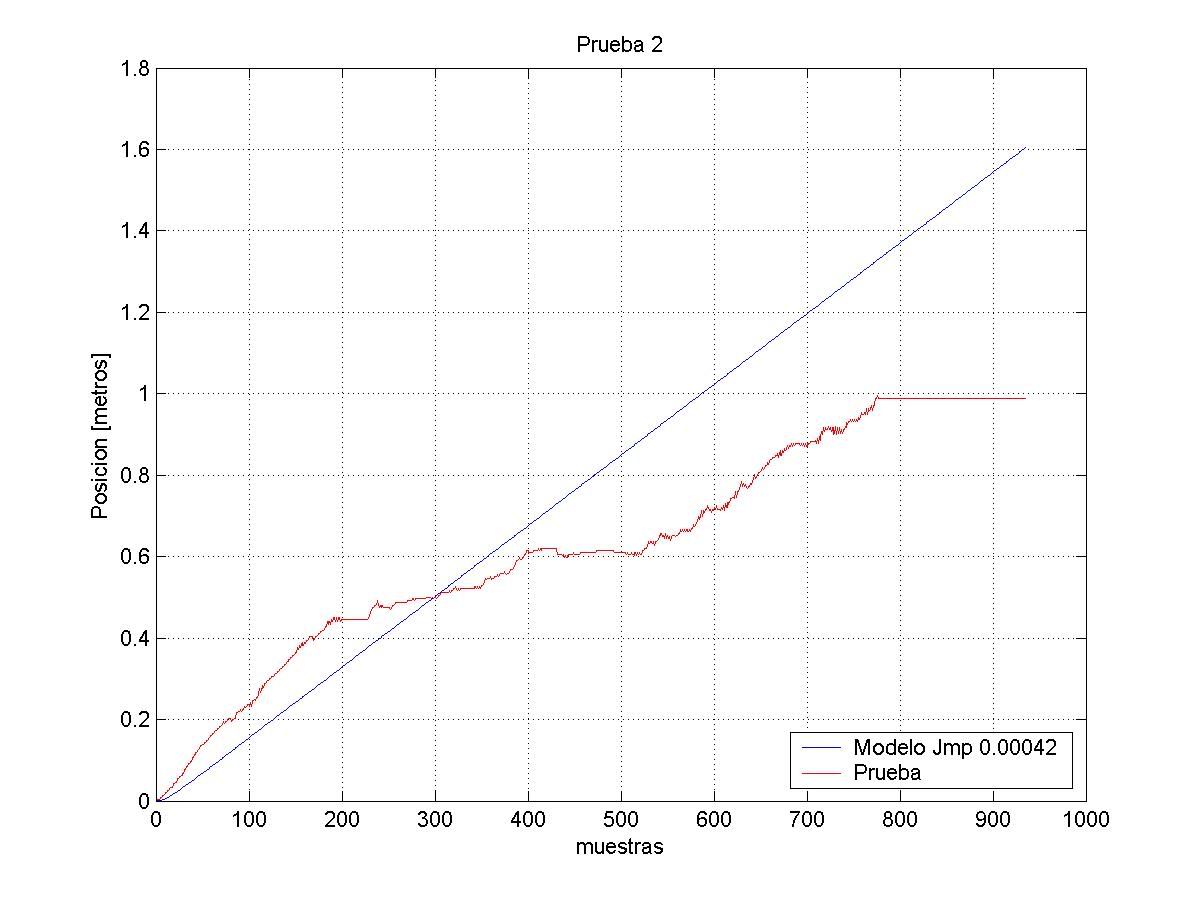
El ensayo del sistema con 24V ha sido más alentador de lo esperado ya que obtuvimos, experimentalmente, algunos valores teóricos planteados en un marco netamente optimista. Sin embargo, aún hay diferencias significativas entre el movimiento de avance y de retroceso, como se puede ver en las figuras a continuación:
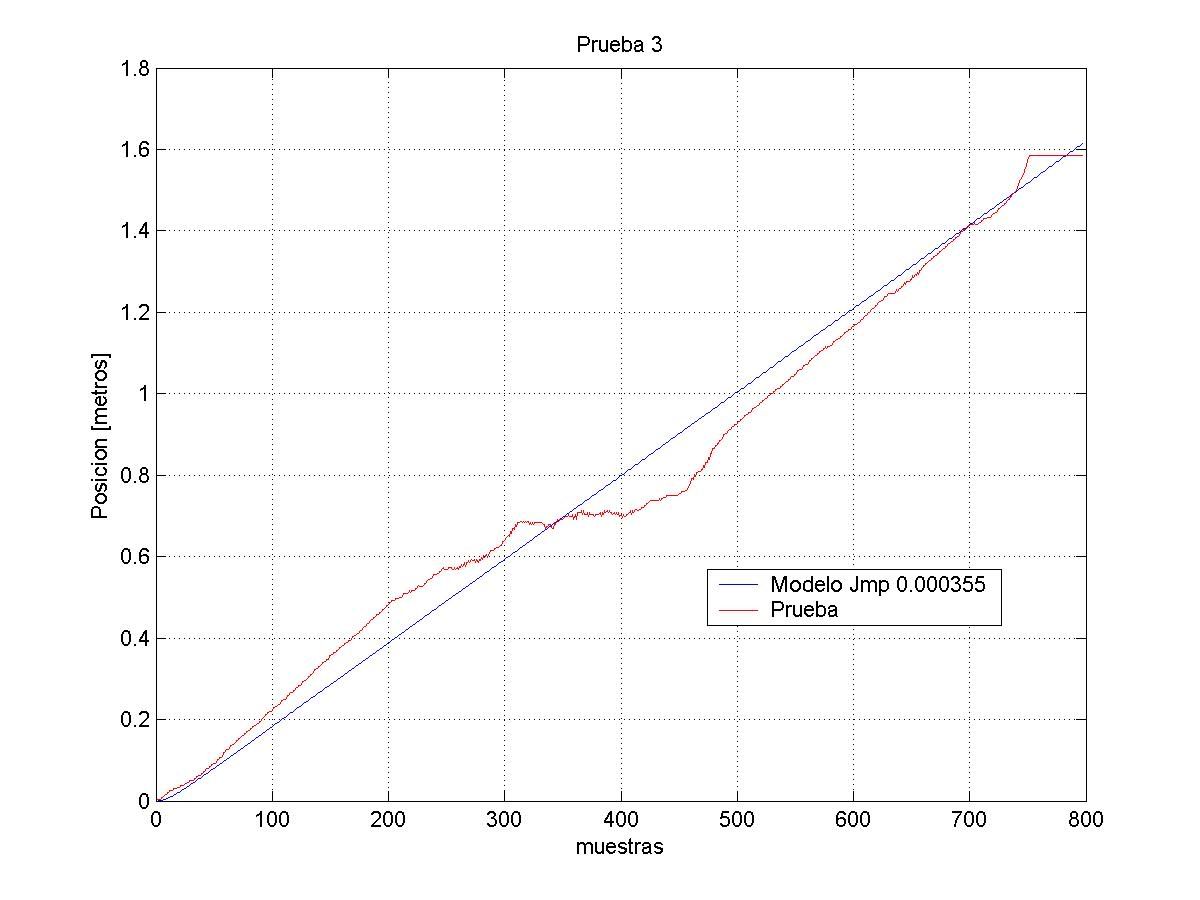
Aquí se puede ver un defecto en el movimiento del puente grúa, provocado por un desajuste del eje del motor. En la figura 10 se destaca éste error del resto de las pruebas realizadas en retroceso

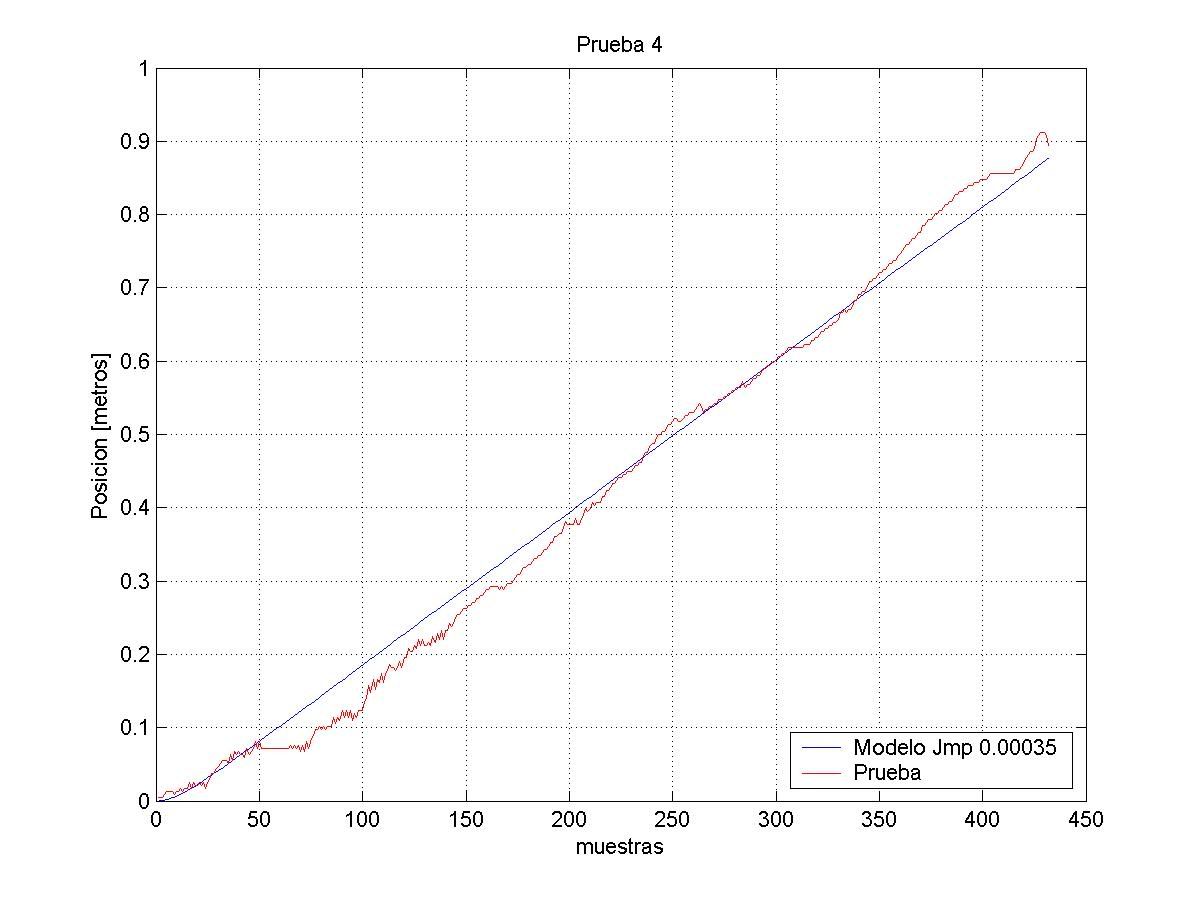
Se repitió el error de la prueba 3, ocasionando un desvío en la posición del puente durante las primeras 50 muestras del ensayo.

En conclusión, se obtuvieron respuestas homogéneas para cada sentido de movimiento con escasa dispersión en el principal parámetro de ajuste, salvo para las pruebas 3 y 6.
Quedan pendientes algunos detalles mecánicos que, por el momento, provocan las diferencias entre avance y retroceso.
Por último, la velocidad promedio del puente grúa es de unos 36cm/seg (levemente superior al calculado teóricamente) y tiempo de recorrido de 4,6 seg aproximadamente.










































{kind=link}