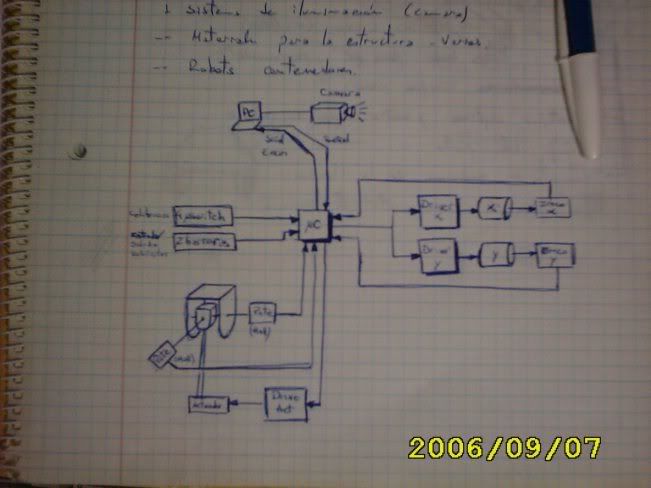
Como podrá verse más adelante, el sistema que hemos pensado puede tomarse como un conjunto de bloques relacionados entre sí, en el que cada uno cumple con una función específica.
Núcleo: Corresponde al microcontrolador y aún no se ha determinado si uno solo concentrará todas las funciones a realizar, o serán más para distribuirse las tareas. En una primera etapa creemos que los uC de ATMEL, en especial Atmega8 o Atmega16, podrían ser de mucha utilidad. Las razones se deben a la familiaridad que poseemos con la marca y a la existencia de un programador casero para cargar los programas al micro.
Sensores: Serán los encargados de medir la posición de la plataforma en el plano y el ángulo del péndulo para que el control de las oscilaciones tenga efecto. En el primer caso, se emplearán encoders y, en el segundo, se necesitarán dos potenciómetros o sensores de efecto Hall, uno por cada grado de libertad o eje.
Actuación: Se trata del elemento final de control, en nuestro caso son dos motores de imán permanente de corriente continua, para cubrir los movimientos en el plano x-y. Además, se deberán construir drivers que serán los encargados de suministrar la potencia necesaria para que éstos funcionen correctamente.
Comunicación: El uC estará comunicado permanentemente con una PC para informarle de la posición de la plataforma y los ángulos del péndulo. A esto se le agrega el sistema de visión residente en la PC, que determinará la referencia en posición y velocidad para el seguimiento de objetos, por lo que deberá transmitir al micro tanto posición como velocidad respecto del carro principal de la plataforma.
Visión: Uno de los atractivos del proyecto será el uso de una cámara web que se empleará para observar los eventos que sucedan bajo el manipulador. En éste caso, nuestra intención será usar paquetes o herramientas ya desarrolladas que faciliten los cálculos del procesamiento de las imágenes digitales.
Entradas Discretas: Existirán en un principio dos tipos diferentes de sensores discretos. Por un lado, habrá microinterruptores para realizar la calibración del manipulador y, por el otro, barreras ópticas para determinar el sentido de paso de los vehículos bajo la plataforma.
{kind=link}

Atmel: www.atmel.com
Atmega8: www.atmel.com/dyn/products/product_card.asp?part_id=2004
Atmega16: www.atmel.com/dyn/products/product_card.asp?part_id=2010
Grado de libertad:
www.dliengineering.com/vibman-spanish/gradodelibertad1.htm
http://es.wikipedia.org/wiki/Grado_de_libertad
http://club.telepolis.com/ohcop/gradlibe.html
http://pespmc1.vub.ac.be/ASC/DEGREE_FREED.html
http://en.wikipedia.org/wiki/Degrees_of_freedom_(engineering)
www.zyvex.com/nanotech/6dof.html
Efecto Hall: http://robots-argentina.com.ar/Sensores_magnetismo.htm
Drivers:
http://robots-argentina.com.ar/MotorCC_PuenteH.htm
http://www.x-robotics.com/motorizacion.htm
http://www.eis.uva.es/amuva/cybertaller/electronica/electronica.htm
No hay comentarios.:
Publicar un comentario